快速启动开发参考
1. 快速启动的配置¶
1.1. 概述¶
本文档将介绍快速启动的配置以及使用。
1.2. 启动流程¶

-
快速启动默认跳过uboot,直接启动kernel
-
需要进入uboot可以长按enter,重新开机直到进入uboot
-
后启动流程是指系统运行后profile执行阶段
1.3. 编译¶
-
找到相应ramfs配置,例:
./setup_config.sh configs/nvr/i2m/8.2.1/nor.glibc-ramfs.011a.64 -
make image
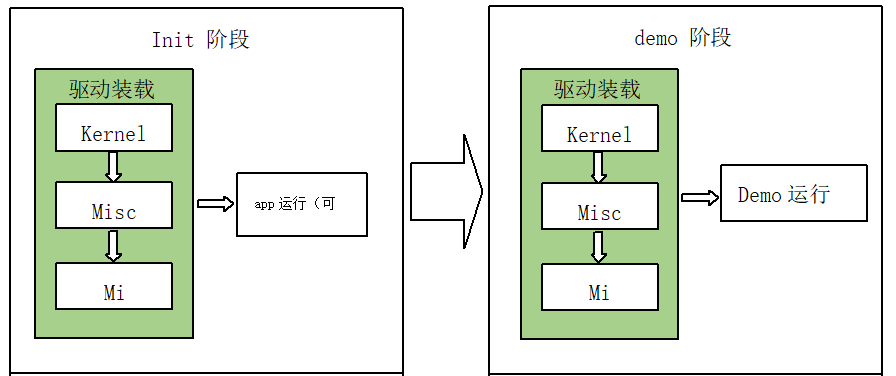
1.4. 后启动流程介绍¶
本阶段包括分区的挂载与modules的装载,大致分为两个阶段:init 阶段 与 demo阶段
-
init 阶段:(refer to /etc/init.sh)
该阶段进行系统必要的环境配置:
-
装载系统环境配置必要驱动
依次装载kernel,misc, mi驱动
-
app 运行
该demo需在后台运行,存放在dram
-
-
demo阶段:(refer to demo.sh)
该阶段进行demo运行的其它操作
-
装载次要驱动
依次装载kernel,misc, mi驱动
-
demo 运行
该demo 存放于flash
-
1.5. 模块装载配置¶
本小节讲解模块的装载相应的配置文件,可以根据需求灵活配置。
-
init 阶段:
-
特点
模块存放于ramfs分区,系统运行时存放于dram中(lib/modules/4.9.84)
-
配置文件存放目录
project下相应驱动存放目录
-
配置文件
用于配置各阶段装载的驱动,将驱动名添加到相应文件即可
-
kernel_mod_list:
系统初始化的kernel驱动,例如nls_utf8.ko
-
misc_mod_list:
系统初始化的misc驱动,例如mhal.ko
-
mi_mod_list:
系统初始化的mi驱动,例如mi_sys.ko
-
-
配置文件使用方式:
将相应驱动的驱动名添加到对应配置文件
-
-
demo阶段:
-
特点
模块存放于config分区(flash),不占用内存空间(/config/modules/4.9.84)
-
配置文件存放目录
project下相应驱动存放目录
-
配置文件
用于配置各阶段装载的驱动,将驱动名添加到相应文件即可
-
kernel_mod_list_late:
demo运行需要的kernel驱动, 例如:usb-storage.ko
-
misc_mod_list_late:
demo运行需要的misc驱动,例如:fbdev.ko
-
mi_mod_list_late:
demo运行需要的mi驱动,例如:mi_ai.ko
-
-
配置文件使用方式
将相应驱动的驱动名添加到对应配置文件
-
1.6. 动态链接库的存放分区配置¶
动态链接库可以存放到ramfs分区与config分区,前者占用内存空间,后者存放于flash。
-
存放于ramfs 分区
-
配置文件名:lib_list_first
-
配置文件路径:
动态链接库目录,例如:release/usbcam/i6/009A-fastboot/glibc/8.2.1/lib/dynamic
-
使用方式:
将对应库名添加到配置文件
-
-
存放于config分区
-
配置文件名:lib_list_second
-
配置文件路径:
动态链接库目录:例如:release/usbcam/i6/009A-fastboot/glibc/8.2.1/lib/dynamic
-
使用方式
将对应库名添加到配置文件
-
1.7. alkaid 与 Image编译配置¶
-
alkaid编译选项配置:
-
配置文件位置:image/configs/ 例:configs/usbcam/i6/nor.glibc-ramfs.009a.64.qfn88
-
配置项:
配置项 作用 实例 CHIP 芯片类型 i6 BOARD 开发板类型 009A-fastboot BOARD_NAME 开发板名字 SSC009A-S01A PRODUCT 产品类型 usbcam TOOLCHAIN 编译工具类型 glibc TOOLCHAIN_VERSION 编译工具版本 8.2.1 KERNEL_VERSION linux内核版本 4.9.84 LIBC libc库的版本 libc-2.28 BUSYBOX 指定busybox busybox-1.20.2-arm-linux-gnueabihf-glibc-8.2.1-dynamic IMAGE_CONFIG image配置文件 IMAGE_CONFIG = nor.ramfs.hfglibc.nvr.mma CUSTOMER_OPTIONS 添加sdk编译环境 null_options.mk CUSTOMER_TAILOR 开启/关闭sdk编译模块 usbcam_i6_tailor.mk MMAP Linux内存分布配置 MMAP_I6_64.h MHAL mhal编译选项 i6 IQ0- IQ3 所需Iq文件配置 imx307_iqfile.bin (ipc) EXBOOTARGS 拓展bootargs选项 loglevel=0 kernel$(BOOTENV) bootargs kernel 启动配置 LX_MEM=$(KERNEL_MEMLEN) mma_heap=mma_heap_name0,miu=0,sz=0x2000000 mma_memblock_remove=1 TOOLCHAIN_REL Toolchain前缀 arm-linux-gnueabihf- SENSOR_LIST 开发板所需sensor imx291_MIPI.ko imx307_MIPI.ko sc4236_MIPI.ko SC4238_MIPI.ko SENSOR0 默认sensor imx307_MIPI.ko SENSOR0_OPT sensor装载参数 chmap=1 FLASH_SIZE flash大小 16M -
-
Image 编译配置:
-
配置文件位置:image/configs/
例:
image/configs/i6/nor.ramfs.hfglibc.nvr.mma -
配置项:
配置项 作用 实例 IMAGE_LIST 配置image 生成的bin档目标 ipl uboot kernel rootfs nvrservice customer FLASH_TYPE flash的类型 nor BOOT_TYPE rootfs类型 fastboot PAT_TABLE flas接口类型 spi PHY_TEST 是否测试phy no ipl$(RESOUCE) ipl路径 $(PROJ_ROOT)/board/$(CHIP)/boot/ipl/fastboot/IPL.bin ipl_cust$(RESOUCE) ipl_cust路径 $(PROJ_ROOT)/board/$(CHIP)/boot/ipl/fastboot/IPL_CUST.bin uboot$(RESOUCE) uboot路径 $(PROJ_ROOT)/board/$(CHIP)/boot/$(FLASH_TYPE)/uboot/ u-boot.xz.img.bin kernel$(RESOUCE) kernel Image路径 $(PROJ_ROOT)/release/$(PRODUCT)/$(CHIP)/$(BOARD)/$(TOOLCHAIN) /$(TOOLCHAIN_VERSION)/bin/kernel/$(FLASH_TYPE)/uImage.mz kernel$(PATSIZE) Kernel分区大小 0x200000 kernel$(BOOTENV) bootargs的kernel参数指定 $(KERNEL_BOOT_ENV) loglevel=0 kernel$(BOOTCMD) bootcmd的kernel参数指定 sf read $(KERNELBOOTADDR) \$${sf_kernel_start} \$${sf_kernel_size}\; rootfs$(RESOUCE) rootfs 输出目录 $(OUTPUTDIR)/rootfs rootfs$(FSTYPE) rootfs 所用文件系统类型 ramfs rootfs$(PATSIZE) rootfs 所占分区大小 0x400000 rootfs$(BOOTENV) bootargs的rootfs参数指定 rootfstype=ramfs initrd=$(INITRAMFSLOADADDR),$(rootfs$(PATSIZE)) rootfs$(BOOTCMD) bootcmd的rootfs参数指定 mxp r.info rootfs\; sf read $(INITRAMFSLOADADDR) \$${sf_part_start} \$${sf_part_size}\; -
用户分区相关配置
配置项 作用 实例 USR_MOUNT_BLOCKS 配置所需用户分区 (支持config customer) nvrservice customer nvrservice$(RESOUCE) nvrservice 分区目录 $(OUTPUTDIR)/tvconfig/config nvrservice$(FSTYPE) nvrservice 分区类型 squashfs nvrservice$(PATSIZE) nvrservice 分区大小 0x300000 nvrservice$(MOUNTTG) nvrservice 分区挂载目标 /config nvrservice$(MOUNTPT) nvrservice 分区挂载点 /dev/mtdblock3 customer$(RESOUCE) customer分区目录 $(OUTPUTDIR)/customer customer$(FSTYPE) customer分区类型 jffs2 customer$(PATSIZE) customer分区大小 0x6B0000 customer$(MOUNTTG) customer分区挂载目标 /customer customer$(MOUNTPT) customer分区挂载点 mtd:customer
-
2. 驱动与库的使用¶
2.1. 简介¶
本章将根据所需功能介绍所需要的驱动和一些动态链接库的使用。
2.2. 按驱动分类¶
| 所属分类 | 驱动 | 备注 |
|---|---|---|
| usb 基础驱动 | usb-comon.ko | usb 基础驱动 |
| usb-core.ko | usb host 基础驱动 | |
| ehci-hcd.ko | usb2.0 host控制器驱动 | |
| xhci-hcd.ko | usb3.0 host控制器驱动 | |
| u 盘 | usb-storage.ko | usb 盘驱动 (依赖usb基础驱动) |
| 鼠标 | mousedev.ko | 鼠标输入驱动 |
| usbhid.ko | usb 鼠标(依赖usb基础驱动) | |
| 网卡 | of_mdio.ko | 依赖文件 |
| kdrv_emac.ko | 平台相关底层网卡驱动 | |
| sstar_100_phy.ko | ||
| sunrpc.ko | 用于远程命令执行的远程过程调用(RPC)协议,被网络文件系统(NFS)使用 | |
| libphy.ko | 网络基础驱动 | |
| fixed_phy.ko | ||
| mtd 设备 | ubi.ko | ubi驱动 |
| mmc card | mmc_core.ko | mmc 基础驱动 |
| mmc_block.ko | ||
| kdrv_sdmmc.ko | sd 卡驱动 | |
| 看门狗 | mdrv_wdt.ko | 看门狗驱动 |
| 字体 | nls_utf8.ko | utf8 字体驱动 |
| 硬盘 | sd_mod.ko | scsi 接口磁盘支持 |
| libahci.ko | 串行ata接口相关驱动 | |
| ahci_platform.ko | ||
| libahci_platform.ko | ||
| libata.ko | ||
| mdrv-sata-host.ko | sata底层驱动 | |
| iic | mii.ko | i2c 驱动 |
| 文件系统 | grace.ko, nfs.ko | nfs网络文件系统 |
| grace.ko, nfsv2.ko | nfs网络文件系统(version2) | |
| ubifs.ko | ubi文件系统(flash) | |
| jffs2.ko | jffs2文件系统(flash) | |
| Squashfs | 压缩只读文件系统 | |
| fat.ko | fat 文件系统 | |
| vfat.ko | vfat 文件系统(u 盘) | |
| cifs.ko | cifs文件系统(samba) | |
| ntfs.ko | ntfs文件系统 |
2.3. 按库分类¶
| 所属分类 | 库 | 备注 |
|---|---|---|
| toolchain相关 | librt-2.28.so | 实时扩展库,包含信号量,同步io等 |
| libm-2.28.so | 数学相关库 | |
| ld-2.28.so | 链接库 | |
| libresolv-2.28.so | 提供网络域名包解析相关功能 | |
| libdl-2.28.so | 加载动态 | |
| libstdc++.so | 标准库 | |
| libc-2.28.so | ||
| libpcprofile.so | ||
| libpthread-2.28.so | 线程相关库 | |
| MI相关 | libmi_common.so | mi 必备基础库 |
| libmi_sys.so | mi 必备基础库,负责搭建基础mi框架,提供buf管理 | |
| libmi_sensor.so | sensor 相关库 | |
| libmi_vif.so | vif 相关库 | |
| libmi_vpe.so | vpe相关库 | |
| libmi_venc.so | 提供视频解码功能 | |
| libmi_rgn.so | 提供画图功能 | |
| libmi_disp.so | 提供视频拼接,视频输出功能,对接panel,hdmi等 | |
| libmi_vdec.so | 提供视频解码功能 | |
| libmi_vdf.so | 提供视频算法功能,包括移动监测,遮挡检测,虚拟围栏等 | |
| libmi_shadow.so | 提供vdf对接接口 | |
| libmi_iqserver.so | 提供网络调试iq的功能,对接isp模块 | |
| libmi_ldc.so | 提供鱼眼镜头回正支持 | |
| libmi_ive.so | 提供硬件算子的使用 | |
| libmi_isp.so | 提供高级图像调试接口 | |
| libmi_ai.so | audio 输入相关库 | |
| libmi_ao.so | audio 输出相关库 | |
| libmi_gfx.so | 提供数据搬移功能 | |
| libmi_hdmi.so | hdmi相关库 | |
| libmi_panel.so | panel相关库 | |
| libmi_fb.so | 提供fb设备支持 | |
| libmi_cipher.so | 提供数据加密解密功能 | |
| others | libcus3a.so | 提供isp高级功能,如自动对焦 |
| libMD_LINUX.so | vdf 相关库,提供移动监测功能 | |
| libOD_LINUX.so | vdf 相关库,提供遮挡检测功能 | |
| libVG_LINUX.so | vdf 相关库,提供虚拟围栏功能 | |
| libAEC_LINUX.so | audio算法库,提供aec功能 | |
| libAED_LINUX.so | audio算法库,提供babycry检测,高分贝检测 | |
| libAPC_LINUX.so | audio算法库,提供降噪,均衡化,自动增益控制,高通滤波 | |
| libSRC_LINUX.so | audio算法库,提供重采样功能 | |
| libg711.so | audio算法库,提供g711编解码 | |
| libg726.so | audio算法库,提供g726编解码 |
注意:toolchain 相关库为必须库,mi 库请根据需要加载,others 需根据相应mi模块需要加载。